Table of contents
- 1. New ISTTOK slow control system
- 1.1. Intro
- 1.2. Team and responsabilities
- 1.3. System description
- 1.4. State machine description
- 1.5. Hardware Platform
- 1.5.1.1. Temperature/Vacuum Node
- 1.5.1.2. Local Control
- 1.5.1.3. Central Node
- 1.6. Software Platform
- 1.6.1.1. Temperature/Vacuum Node
- 1.6.1.2. Local Control
- 1.6.1.3. Central Node
- 1.6.1.4. Building EPICS base http://www.aps.anl.gov/epics/base/R3-14/12-docs/README.html#0_0_12
- 1.6.1.5. Channel Access configuration
- 1.7. Protocol for communication between dspics and PC in ISTTOK slow control
- 1.7.1.1.1. Examples: PIC -> PC
- 1.7.1.1.2. PC -> PIC
- 1.7.1.2. Table of words:
- 1.8. Archive System
- 2. References
This page is Outdated. Please follow new code in IPFN GIT Server Git https://git.ipfn.tecnico.ulisboa.pt/tree/ISTTOK.git
New ISTTOK EPICS Slow Control documentation moved to Markdown Format in README.md
TOC
- 1. New ISTTOK slow control system
- 1.1. Intro
- 1.2. Team and responsabilities
- 1.3. System description
- 1.4. State machine description
- 1.5. Hardware Platform
- 1.5.1.1. Temperature/Vacuum Node
- 1.5.1.2. Local Control
- 1.5.1.3. Central Node
- 1.6. Software Platform
- 1.6.1.1. Temperature/Vacuum Node
- 1.6.1.2. Local Control
- 1.6.1.3. Central Node
- 1.6.1.4. Building EPICS base http://www.aps.anl.gov/epics/base/R3-14/12-docs/README.html#0_0_12
- 1.6.1.5. Channel Access configuration
- 1.7. Protocol for communication between dspics and PC in ISTTOK slow control
- 1.7.1.1.1. Examples: PIC -> PC
- 1.7.1.1.2. PC -> PIC
- 1.7.1.2. Table of words:
- 1.8. Archive System
- 2. References
Other pages:
New ISTTOK slow control system
Intro
The new ISTTOK slow control system is designed to replace the former vaccum/power/slow timing system based is the EDWARDS controller.
The new system uses the EPICS framework and the Control System Studio, below there is a detailed description of the used software. In the next figure is depicted the system structure.
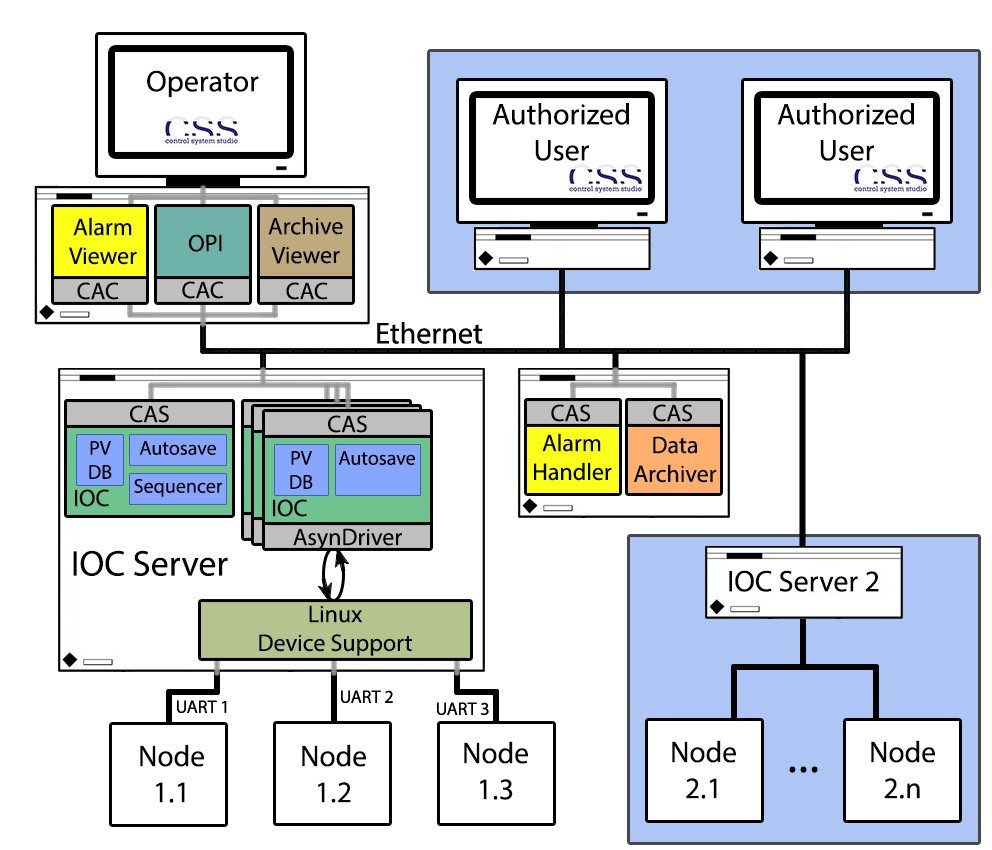
At the present all the software are installed in two IOC servers with the exception of the Control System Studio that is also used for the GUI management.
Team and responsabilities
- Horácio Fernandes (ISTTOK Leader)
- Bernardo Carvalho (Project Leader)
- Paulo Duarte (ISTTOK Session Leader, State Machine develpment)
- Tiago Pereira (dsPIC development, RS232 protocol/ Sensor Interface/ Wiring)
- Paulo F. Carvalho ( Epics Applications)
- Bruno Santos (Epics)
- Gonçalo Quintal (Epics, CSS Gui Panels)
System description
Presently there are two instances of EPICS IOC Server implemented. One responsible for the Temperature /Vacuum Node. And a second one, installed in a Raspberry Pi, implemented in the new control unit launched at ISTTOK for the remote control of the vacuum pumps, named Central Node.
Temperature/Vacuum Node: Vacuum System
- Pfeiffer pressure gauges
The dsPic acquires the pressure value from the Pfeiffer gauge, with the Pfeiffer protocol working on RS485, and sends the pressure to a high level PC application.
Process Value in the IOC Server for this system.
| PV Name | PV Type | Archive |
| ISTTOK:vacuum:Uptime | longin | no |
| ISTTOK:vacuum:Diff_Uptime | calc | no |
| ISTTOK:vacuum:Last_Uptime | calc | no |
| ISTTOK:vacuum:Pressure_Chamber1 | ai | yes |
| ISTTOK:vacuum:Pressure_Primary1 | ai | yes |
Temperature/Vacuum Node: Temperature Sensors and ELCO Voltage Measurement Systems
| PV Name | PV Type | Archive |
| ISTTOK:temperature:Uptime | longin | no |
| ISTTOK:temperature:Diff_Uptime | calc | no |
| ISTTOK:temperature:Last_Uptime | calc | no |
| ISTTOK:temperature:RawTemperature_0 | ai | yes |
| ISTTOK:temperature:Temperature_0 | calc | yes |
| ISTTOK:temperature:RawTemperature_1 | ai | no |
| ISTTOK:temperature:Temperature_1 | calc | no |
| ISTTOK:temperature:RawTemperature_2 | ai | no |
| ISTTOK:temperature:Temperature_2 | calc | no |
| ISTTOK:temperature:RawTemperature_3 | ai | no |
| ISTTOK:temperature:Temperature_3 | calc | no |
| ISTTOK:temperature:RawCapbank_Voltage | ai | no |
| ISTTOK:temperature:Capbank_Voltage | calc | no |
Central Node
| PV Name | PV Type | Archive |
| ISTTOK:central:RotatoryPump | bo | - |
| ISTTOK:central:RotatoryValve | bo | - |
| ISTTOK:central:TMPControllerOn | bo | - |
| ISTTOK:central:TMPControllerOnInv | calcout | - |
| ISTTOK:central:TMPControllerOff | bo | - |
| ISTTOK:central:TMPControllerOffInv | calcout | - |
| ISTTOK:central:TMPMotorOn | bo | - |
| ISTTOK:central:TMPMotorOnInv | calcout | - |
| ISTTOK:central:TMPMotorOff | bo | - |
| ISTTOK:central:TMPMotorOffInv | calcout | - |
| ISTTOK:central:Turbo_PW_Ind | bi | - |
| ISTTOK:central:Turbo_Emergency | bi | - |
| ISTTOK:central:Turbo_Acceleration | bi | - |
| ISTTOK:central:Turbo_NormalOperation | bi | - |
| ISTTOK:central:TMPManualValve | bo | - |
State machine description
The developed state machine for EPICS uses the State Notation Language and Sequencer module.
In the next Figure is depicted the state machine flow,
And the Process Value in the IOC Server for this system,
| PV Name | PV Type | Archive |
| ISTTOK:central:AUTHORISATION | bo | - |
| ISTTOK:central:OPREQ | bo | - |
| ISTTOK:central:PROCESS-MODE | bo | - |
| ISTTOK:central:PROCESS-REQ | bo | - |
| ISTTOK:central:COUNTER | calc | - |
| ISTTOK:central:OPCALCSTATE | calc | - |
| ISTTOK:central:COUNTDOWN | mbbi | - |
| ISTTOK:central:PULSE-NUMBER | longout | - |
| ISTTOK:central:OPSTATE | longout | - |
| ISTTOK:central:CurrentTime | stringin | - |
| ISTTOK:central:TraceMessage | stringout | - |
| ISTTOK:central:STARTINGSTATE | mbbi | - |
| ISTTOK:central:STOPPINGSTATE | mbbi | - |
Hardware Platform
Temperature/Vacuum Node
One PC Controller
- Intel(R) Atom(TM) CPU 330 @ 1.60GHz, Dual Core, 1 Gbyte RAM, 4 RAM
- 4 Serial Ports
- IP addr:192.168.1.152 ( ISTTOK private network)
- Scientific Linux CERN 6 (SLC6) with MRG Realtime extensions
- Linux kernel 3.2.33-rt50.66.el6rt.x86_64
- NTP time conected to IPFN Gps NTP/PPS server IP:10.136.236.255
Local Control
One or more dsPic board running an embedded firmware
-
Central Node
- A Raspberry Pi, running a linux distribution
-
It also has a USB RS485 port for monitoring pressure (to be connected soon)
-
- An Interface Board, velleman k8000:
-
connected to raspberry Pi through I2C interface;
-
8 isolated output connected to the relays (6 relays installed for the rotatory control, 2 in use);
-
4 isolated outputs connected to SEIKO unit controller;
-
4 isolated inputs connected to SEIKO unit controller;
-
- Indicator leds for the relays in the front panel
- 24 V power supply
Software Platform
All software stored in IPFN SVN server: http://metis.ipfn.ist.utl.pt/svn/cdaq/ISTTOK/
Temperature/Vacuum Node
EPICS v. 3.14.12.3 including modules:
- asyn4-2
- seq-2.1.11
- autosave-5-0
CS-STUDIO
- CSS 3.1.4 Updated to CSS 3.2.16
- BEAUTY - Archive system
- Documentation
Apache Tomcat
Installed Scripts
- epicsenv.sh directory: /etc/profile.d/epicsenv.sh
- epicsenv directory: /usr/bin/epicsenv
- epicsEnv directory: /etc/opt/epics/env.d/epicsEnv
- epicsCaRepeater directory: /etc/init.c/epicsCaRepeater
- service-startup directory: /opt/epics/bin/services/service-startup
- epicsIocLogServer directory: /etc/init.c/epicsIocLogServer
- epicsenv directory: /usr/bin/epicsenv
- ioc-isttok directory: /etc/init.d/ioc-isttok
- isttok-archive-engine directory: /etc/init.d/isttok-archive-engine
- isttok-css-alarm-server directory: /etc/init.d/isttok-css-alarm-server
Local Control
Central Node
Linux Raspian "Stretch" (user :pi):
- IP addr:192.168.1.110 ( ISTTOK private network)
- NTP/timedatectl time conected to IPFN Gps NTP/PPS server IP:10.136.227.237 193.136.136.129
( this is mandatory, Rpi does not have a Real Time clock see https://www.raspberrypi.org/forums/viewtopic.php?t=178763)
EPICS v. base-3.15.5 (in /usr/local/epics) including modules:
- synApps_5_8
- asyn-4-26
- seq-2-2-1
- autosave-5-6-1
- IOC installed in '/opt/epics/iocs/'
For installation EPICS in Rpi see:
Building EPICS base http://www.aps.anl.gov/epics/base/R3-14/12-docs/README.html#0_0_12
configure directory, then the src tree, and finally the test and examples trees. A failure in the latter two will not impact your ability to write SNL programs.Channel Access configuration
echo $EPICS_CA_ADDR_LIST, it should say localhost.
Protocol for communication between dspics and PC in ISTTOK slow control
- all bytes are readable ASCII
- all messages all terminated with two bytes: \r\n (13 10)
- messages have variable length
- framing character for fields inside message is space (32)
- individual fields inside each message have variable length
- the last three characters before the terminator are the ASCII representation of the checksum of all other bytes, excluding the terminator
Examples:
PIC -> PC
VL01_1 VL02_1 VL03_0 TE01_150.9 TE02_80.1 UP_7200 PR01_1.3e-4 CKS\r\n
PC -> PIC
VL01_1 CKS\r\n
Table of words:
Archive System
Main folder: /home/bernardo/css/
References
"EPICS IOC module development and implementation for the ISTTOK machine subsystem operation and control"
Paulo Carvalho, André Duarte, Tiago Pereira, Bernardo Carvalho, Jorge Sousa, Horácio Fernandes, Carlos Correia, Bruno Gonçalves, Carlos Varandas
Fusion Engineering and Design 86 (2011) 1085–1090
- Was this page helpful?
- Tag page (Edit tags)
- What links here
Files 5
| File | Size | Date | Attached by | |||
|---|---|---|---|---|---|---|
 | FiniteStateMachine.png Installed state machine in the new slow control unit Rpi IOC Server | 75.87 kB | 11:34, 2 Feb 2018 | fmourao | Actions | |
| firmware.rar DsPic embedded firmware | 188.54 kB | 15:58, 27 May 2011 | tpereira | Actions | ||
| front_panel_vb.rar GUI in visual basic | 23.25 kB | 17:06, 29 Jun 2011 | tpereira | Actions | ||
| ISTTOK_protocol.ods Protocol between dsPic embedded firmware and high level application | 16.25 kB | 15:58, 27 May 2011 | tpereira | Actions | ||
| systemdraw.png New slow control schematic | 92.39 kB | 11:29, 4 Nov 2014 | gquintal | Actions | |
| Images 2 | ||
|---|---|---|
 Installed state machine in the new slow control unit Rpi IOC ServerFiniteStateMachine.png |  New slow control schematicsystemdraw.png | |